Model easy2¶
Cited in: [ChawdharyCGSY08].
Tag: complexity.
Figure¶
Source code¶
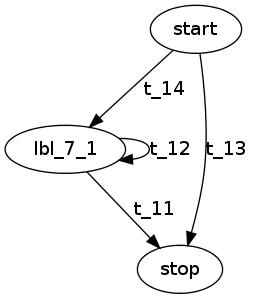
model main {
var x, y, z;
states start, lbl_7_1, stop;
transition t_14 := {
from := start;
to := lbl_7_1;
guard := 1 <= z;
action := x' = x + 1, y' = y - 1, z' = z - 1;
};
transition t_13 := {
from := start;
to := stop;
guard := z <= 0;
action := ;
};
transition t_11 := {
from := lbl_7_1;
to := stop;
guard := z <= 0;
action := ;
};
transition t_12 := {
from := lbl_7_1;
to := lbl_7_1;
guard := 1 <= z;
action := x' = x + 1, y' = y - 1, z' = z - 1;
};
}
strategy main_s {
Region init := {state = start};
}
Expected invariant¶
{ lbl_7_1[v1, v2, v3] : v3 >= 0; stop[v1, v2, v3] : v3 <= 0 }
Results¶
- With Aspic: { start[x, y, z]; lbl_7_1[x, y, z] : z >= 0; stop[x, y, z] : z <= 0 } (0.05s), OK.
- With ISL: { lbl_7_1[x__1, y__1, z__1] : z__1 >= 0 or z__1 >= 0; stop[x__1, y__1, z__1] : z__1 <= 0; stop[x__1, y__1, 0]; start[x, y, z] } (0.01s), OK.